
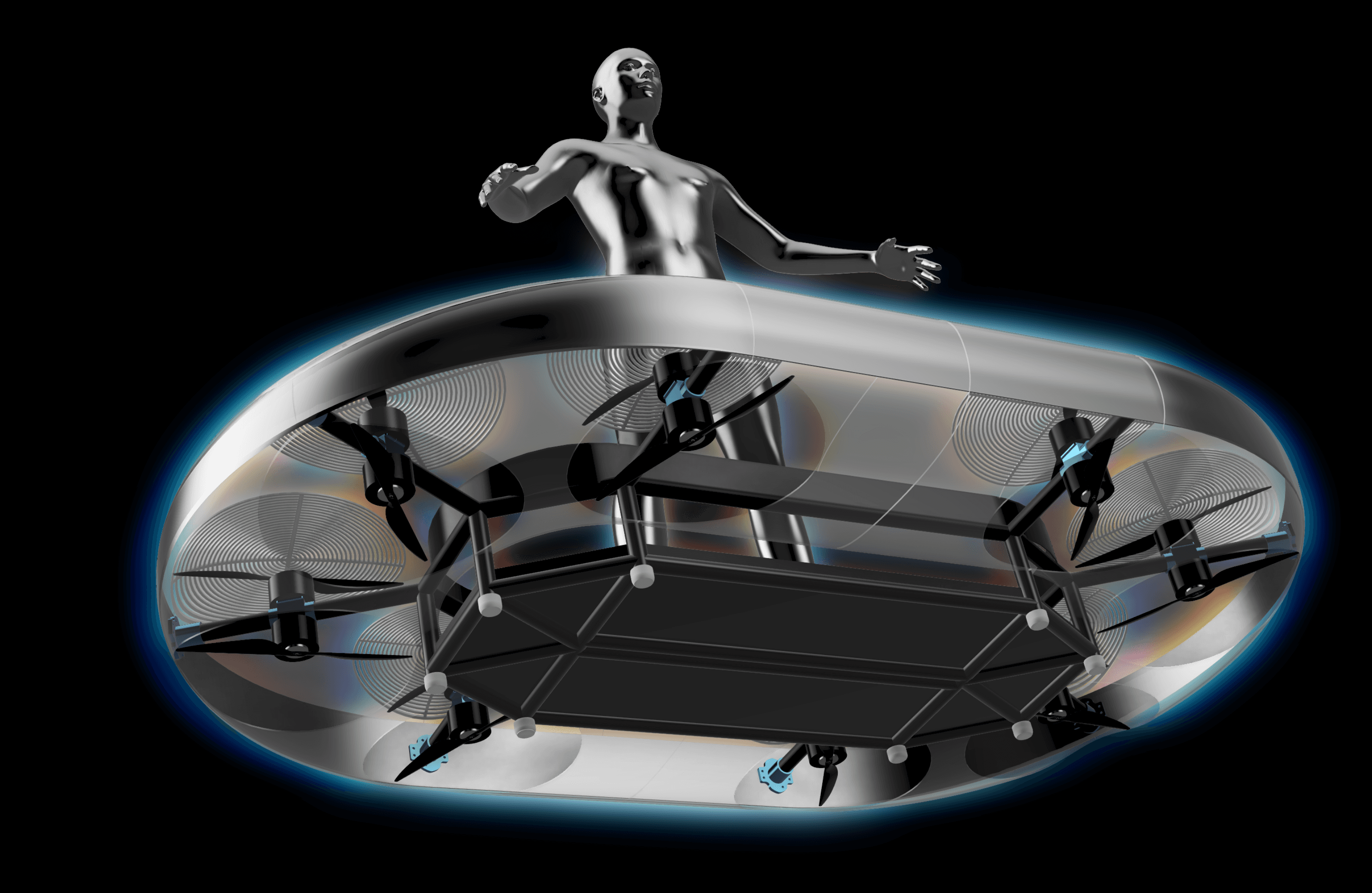










Our First Prototype
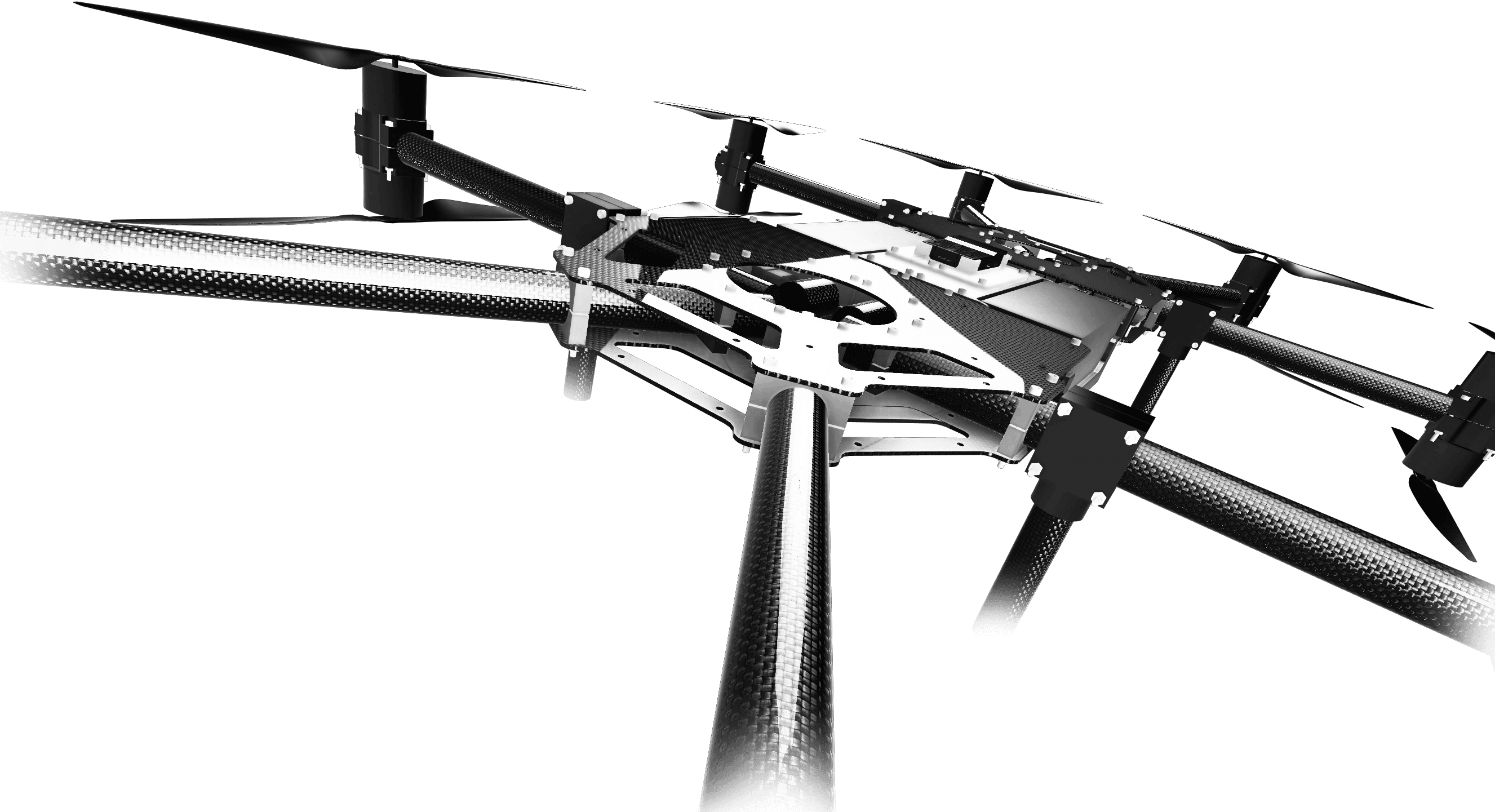
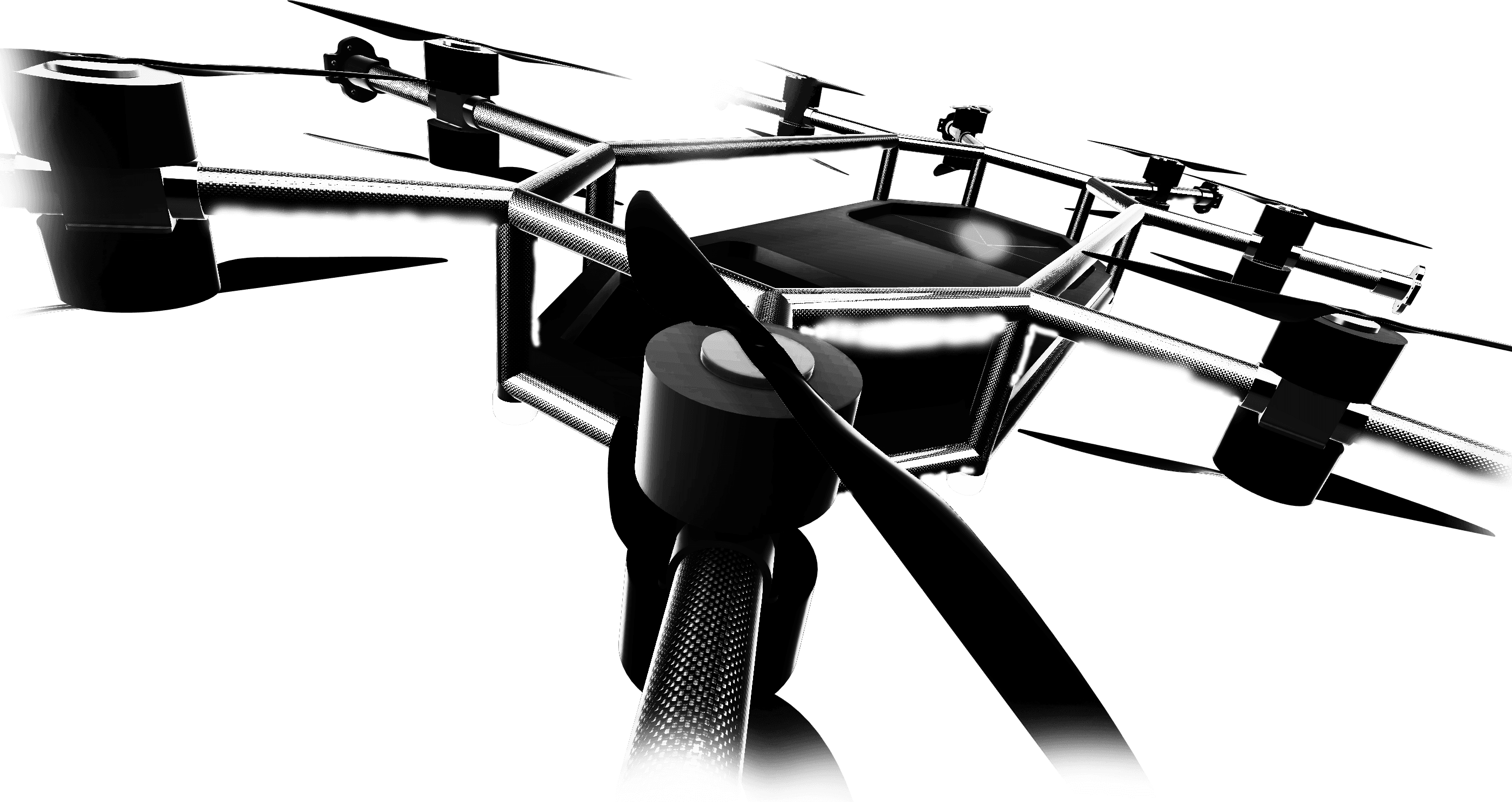
Our first hovercraft build is a 16-motor coaxial multirotor architecture arranged in a symmetric annular planform. Designed for human-mounted operation, the operator stands centrally above the thrust plane in a hoverboard-aligned stance, aligning the combined center of mass with the thrust axis. At full power, the platform delivers ~260 kgf peak static lift, providing thrust margin for controlled hover, transients, and fault-tolerant operation.
Features
Details
Propulsion
I. 16-motor distributed layout in 8 coaxial pairs II. Coaxial spacing tuned to characterize interference losses III. Thrust sharing and failure-case redistribution IV. Full-power hover and transient thrust response




Our projects
Project Name:
20kgf Lift Coaxial Testbed
Description
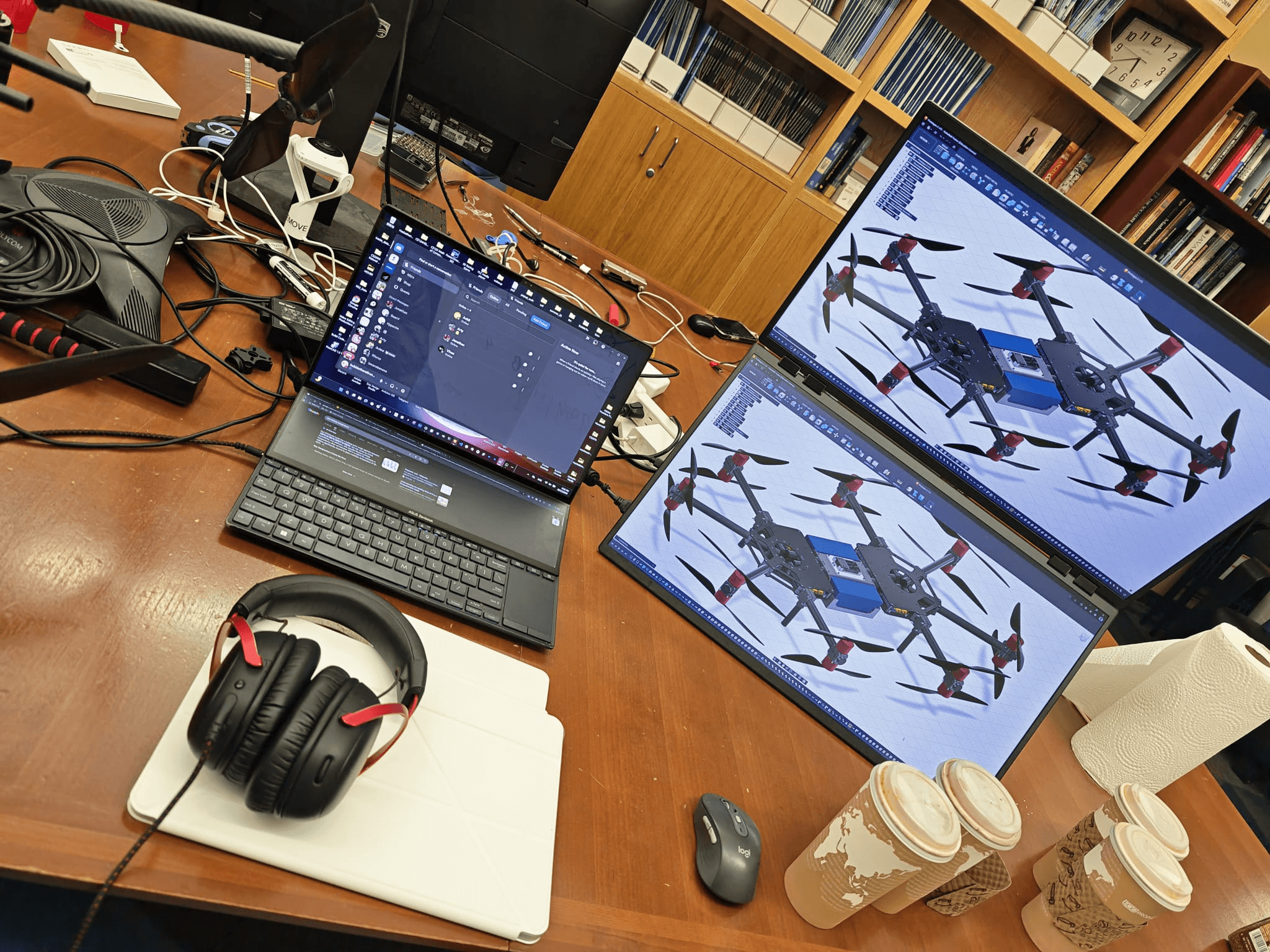
The 20 kgf chassis serves as a downscaled structural validation prototype informing the design of the 260 kgf full-scale system.
Release Date:
Jan 4, 2026
Project Name:
260kgf Lift Full-Scale Chassis
Description
Full-scale load-bearing chassis developed to validate structural integrity and propulsion integration at 260 kgf vertical lift.
Release Date:
Jan 31, 2026
Project Name:
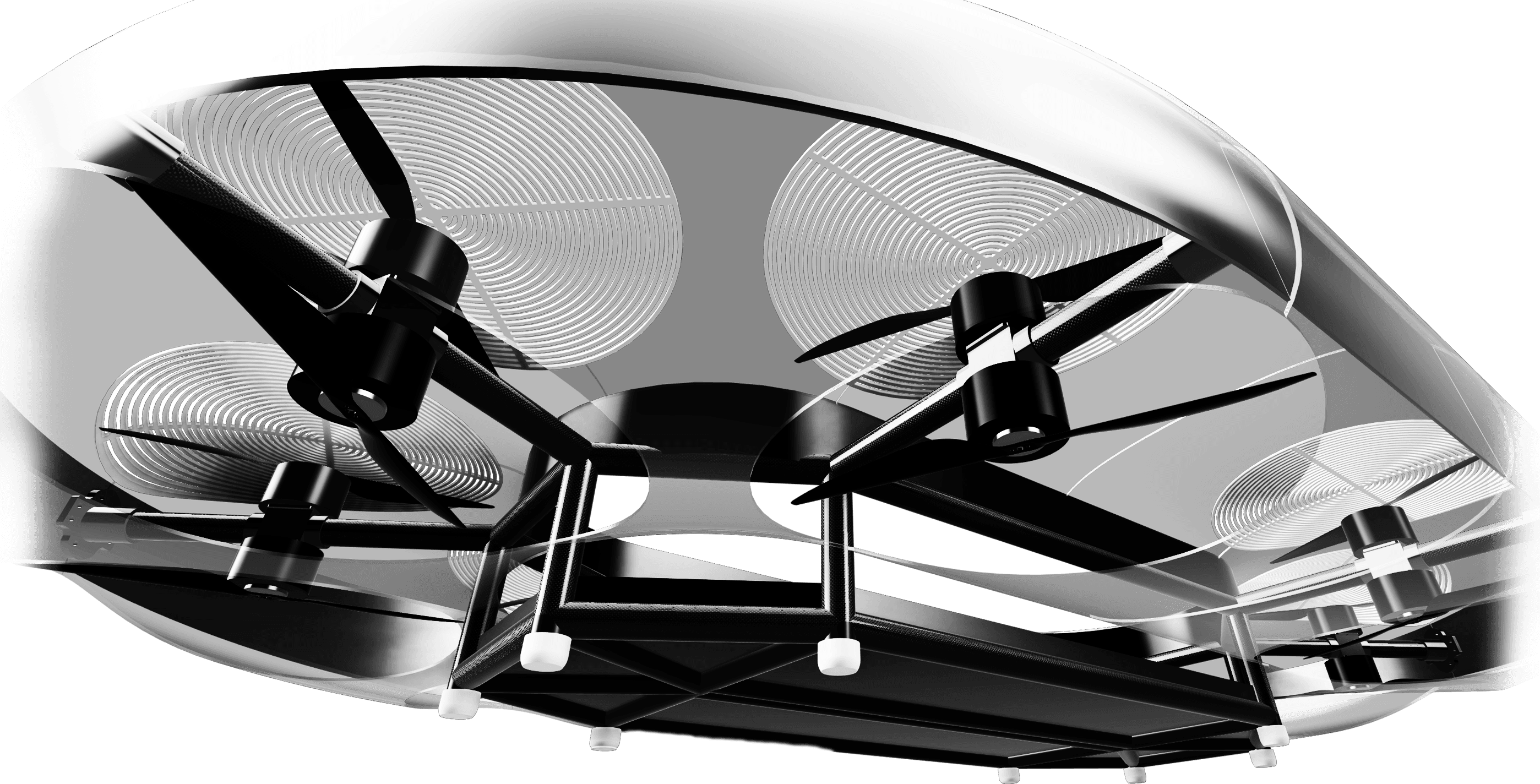
Human–Rotor Interaction Safety Shroud
Description
Design of an erodynamically integrated safety structure to isolate rotating propeller disk from human contact while preserving thermal dissipation and flow efficiency.
Release Date:
Feb 20, 2026
Our Timeline

I. Small prototype launch
Dec 2025

II. Full-scale prototype launch
Feb 2026

III. Human flight testing and validation
Feb - April 2026

IV. Pilot-ready system demonstration
May 2026
Core Members

Ezenbaatar Batjargal
Team Lead
UC Berkeley | B.S. Physics, Mechnical Engineering

Bubble Yu
Mechanical Design
Stanford | B.S., Mechanical Engineering, Computer Science
Joshua Cheung
Jonathan Lie
Powertrain Systems
Stanford | B.S., Electrical Engineering

Taiyo Luke Mitsuoka
Business Outreach
UC Berkeley | B.S., Political Science
Advisors

Yuman Gao
PhD Student at Zhejiang University
Visiting Student Researcher at UC Berkeley

Jiaze Cai
EECS PhD @ MIT
UC Berkeley | Texas A&M

Adam Dai
PhD Candidate at Stanford | Navigation and Autonomy
Let’s Connect
Whether you're interested in becoming a team member, advisor or sponsor, we'd love to hear from you.
